不少人听说过水下机器人;于是,有人问,“我”也能攒一个水下机器人吗?这里,我们不急于回答这个问题,还是先让我们来了解学习一下水下机器人的基本组成知识,最后回答问题。
水下机器人的划分有多种多样,如可以按照控制方式、按照航行方式、按照结构形式、按照推进方式、按照是否载人、按照下潜深度、按照排水量等。以下是水下机器人的常见分类。
(1)按照用途可以分为作业用、勘测用(观测和测量)。作业型,大多有机械臂,主要是完成救援、打捞、电缆敷设和海洋石油及其它生产系统的操作与维修作业。测量用途的跟作业型的类似,但主要用于测定所要调查对象的数据;观测用途的安装有照相机、摄像机和声呐等设备,用来观测海底、地形地貌或搜寻水下物(如考古等)。
(2)水下机器人作业一般都需要与水面母船结合起来共同完成,所以,根据水下机器人与母船之间是否有电缆,可以分为有缆和无缆两种。有缆水下机器人,也称之有缆水下遥控机器人,即ROV,母船通过电缆向水下机器人提供动力和完成遥控控制;无缆水下机器人,即AUV,自身带有动力并能自由行业作业。
(3)按照运动方式,水下机器人可以分为浮游式、履带式和步行式。浮游式水下机器人为零浮力或略大于零的正浮力浮游状态下,依靠所按照的推进器在水下做三维空间运动。履带式类似于陆地的坦克、履带拖拉机等机器设备,可以用来在水底下施工如挖掘、搬运等作业。步行式水下机器人,其构成类似于陆地行走或者海洋爬行动物之类,有“胳膊腿”之类的机械组成,在水下或者海底完成有关运动。
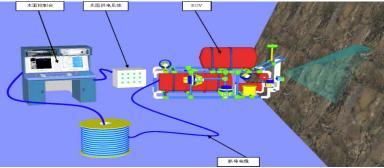
上图是除了ROV母船之外的一套完整的实验性系统,图中所示内容为:ROV本体、脐带电缆、水面供电系统、水面控制台和收放滚子。收放电缆是由专门的转动绞车来完成。
ROV水下机器人一般由框架、配平、推进、光学观测、密封、动力、机械手组成。框架上面安装有机械、电气、推进器、控制用传感器等零部件。如果你要自制ROV选用框架材料时必须考虑化学性能,如抗生物腐蚀、电化学腐蚀等。用于水下和海洋环境的材料目前主要有碳钢、合金钢、不锈钢、黄铜、青铜、铝合金、钛和钛合金等金属材料,工程塑料、橡胶、复合材料等非金属材料。大多数情况下框架要选用金属,其中比较好是铝合金、钛合金;特殊情况下也选用非金属材料。
ROV工作环境是在水流体环境,受力比较复杂、位置和运动变化敏感,操作使用起来比较困难,工作时所需要的平衡不容易实现。所以,给机器人加装所谓的配平单元装置是要考虑的。例如,机器人在甲位置正常工作,但由于水流在很短的时间内机器人“飘到”了乙位置,这样机器人就不能正常工作。为减少和尽量避免这种情况的出现,机器人上面设计安装配平装置;机器人工作时,配平装置会降低或抵消平衡掉导致位置发生变化的力或者力矩,最大限度的减少位置漂移。
水下机器人能在水里按照人们的工作目标灵活准确运动,主要依靠推进器。推进器的重要组成部分之一是螺旋桨,还包括必要的电机、液压泵、液压马达、伺服阀、管子等零部件。水下机器人的推进器有两大类:一类是由电机、电气传动设备与螺旋桨构成;另一类是电机、液压泵、伺服阀、液压马达和螺旋桨构成。前者称为电驱动推进器,后者称为液压驱动推进器。电驱动推进器系统便于实现自动化控制和机器人的智能化;液压驱动推进器偏机械性,用到液压、气压设备零部件,会增加机器人整体的重量,但用电少,对电的依赖性低。设计制造时,推进器系统的选型、计算分析、设备布置都极其重要,不但影响到机器人本身的工作性能,而且也影响到整个机器人的造价,还影响到机器人在使用过程中的维保工作。
耐压舱,这是机器人水下本体中“储藏”计算机、电源和重要电子硬件设备的“隔离室”。有时,一些专业人员还称作电子舱、电池舱。耐压舱的存在主要原因是:为完成某些比较复杂的运动和机械设备的控制工作,有些计算机设备或电子设备是必须要安装固定在水下机器人本体上,不能安装固定在其它地方;而这些设备零部件本身怕水,所以,必须要有干燥密闭的安装空间。另外,照明、成像设备、推进器或者其它机械设备零部件(如机械臂或机械手)所需要的电源,目前技术来说主要是电池,也安装在“隔离室”内。
随着水深的加大,水下的物体受到的压力也会增大;当水深到一定程度时,增大的压力足以将耐压力差的空心容器压扁压断压碎。所以,耐压舱外壳的材料力学性能要求比机器人其它地方的要求更高,一般选用不锈钢、碳纤维、钛合金或陶瓷。设计耐压舱时不但要选取合适的材料,还要考虑一定的安全比例,提高安全可靠性。耐压舱的安全设计制造要结合不同的几何形状完成,因为不同的几何形状制造和连结关系,所带来的力学性能安全性不一样;不同几何空间安装设备零部件时空间利用百分比也不一样,这需要详细的设计分析计算。常见的耐压舱几何形状有球形、圆柱形;球形的空间利用百分比低、但力学性能(如强度)均匀,而圆柱形的空间利用百分比高但力学性能差。具体选择设计使用哪一种几何形状,还要根据里面设备数量和整体布置情况来确定。如下图中,左图部分是需要安装的设备,右图是一个相匹配的圆柱形耐压舱。应当注意的是,不同的机器人构成复杂程度和安装的设备零部件情况不一样,耐压舱的数量、大小、形状和材料也不唯一。


水下机器人的密封系统,是指电气密封和机械密封。水下机器人上的所有电气连接均不能裸露在水里,以免影响正常工作和安全,因此需要密封,这为电气密封;而为实现机器人的机械单元和液压设备正常安全可靠工作,如进行润滑、防止漏油、漏夜等措施,这属于机械密封。密封系统的形式主要为静密封和动密封,如果不考虑概念本身的技术严格性,可以简单的认为所谓的静密封就是指被密封起来的设备零部件或设备和密封件都处在相对静止的,相互之间不存在运动,如将两段电缆用接插座和接插头(针)连接密封在一起;而所谓的动密封则是密封后还存在着运动,如对液压机械手关节的密封。从力学的角度来说,动密封要考虑密封后的设备动力学性质,静密封则不用考虑密封后设备的动力学性质。
水下机器人的光学观察系统由光源和成像两部分组成。光源主要指防水防爆照明灯,用来把机器人工作区域照亮以便于成像设备完成成像工作;常用的光源有大功率卤素灯和小功率的LED灯。成像设备主要指水下摄像机或水下照相机;水下摄像机主要用来进行水下的动态连续成像记录,水下照相机主要上完成静态的间断的成像记录。成像本身目的主要为其它工作提供依据,比如工作状况监视、数据信息处理分析等工作。水下成像设备产品是机器人工作的重要核心关键设备,是水下机器人设备中的高技术产品,是海洋和陆地机械、材料、电子、光学、通讯等专业学科知识综合设计制造出来的。
从水下机器人诞生之日起,人们就认识到机器人本身必须要有作业工具,只有这样才能够在水下进行作业,才可以执行水下搜索、观察、清障、带缆挂钩、切割、清洗、打孔和连接等任务;为此,人们在机器人本体上设计安装了水下工具包设备,包括夹钳、水下清洗刷、喷枪、砂轮切割(/磨削)器、套筒扳手、柔性缆切割器、钢缆切断器、钻孔器、破碎锤等专业工作设备。后来为了扩大作业活动范围和灵活程度,人们将机械臂和机械手设计安装在水下机器人框架上。现在机械臂和机械手对ROV产品来说几乎就是标准配置。几乎所有ROV上设计安装有一套或两套串联型机械臂并有机械手。有少数则安装有三套或四套串联机械臂和机械手;这些机械臂和机械手安装布置也采用了拟人化,安装布置在水下机器人框架的前方。
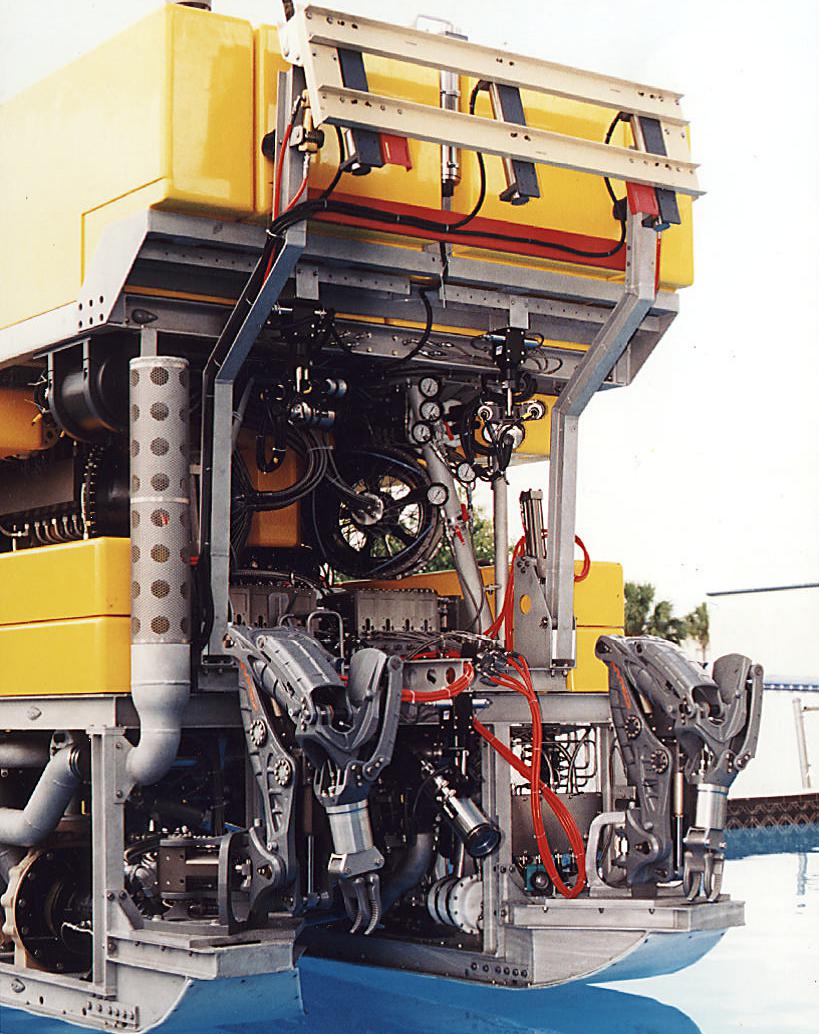
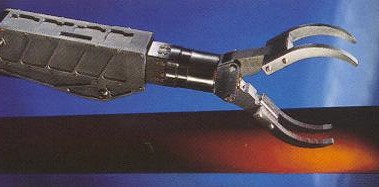
机械臂和机械手的动作完成动力来源是电或液压系统。小功率作业的机械臂及机械手往往采用电力驱动,大功率的作业一般用液压驱动。为减少水下机器人的体积和重量,机械臂和机械手采取轻量化设计,目前很多采用铝合金材料制造。下图中,左边ROV设备中安装有两套机械臂,机械臂的末端手抓部分为卡爪形式,右图所示。
实用的水下机器人ROV除了水下本体外,还有自动化控制操作台,这在前面中我们已经看到了;另外,将机器人放到大海里,需要吊机,连接水面和水下部分的脐带电缆收放也需要绞车,这些设备是安装在母船的甲板工作区或者机械舱内;此外,为实现合理安全可靠的工作和便于控制,水下机器人机架上会安装各种信号传感器,如压力传感器、成像声呐、罗经、深度计等,在这里不作更多介绍。
ROV机器人的控制主要依靠计算机。其中,主控计算机和水面网络光端机安装在母船操作室内的操作台或系统控制柜上,机器人本体设备控制用计算机安装在耐压舱(或电子舱)里面。前文已经说过。水下传感器和成像设备都是适应水下水深的环境制造,虽然从电子工作原理上这些设备与陆地上一般普通的机电场合用传感器类似,但实际构成上差别很大,在防水、防腐、防生物、抗压能力等方面非常强,是陆地普通机电场合的设备传感器所不能相比的。这些设备的选择使用和安装都必须遵照和参考水下和海洋方面的标准,制定这些技术标准的单位一般来说也都是世界范围内或者国内的海洋技术权威机构或组织。而水下机器人ROV计算机系统进行程序软件编程设计则是一件复杂和难度很高的事情,需要软件设计工作人员具有丰富的和比较高的多学科知识,该软件可以说是海洋、光机电等多学科知识融合编程结果。
到此,水下机器人ROV的基本组成介绍完毕,看来以“玩”和娱乐为目的的ROV水下机器人真正实现起来好像并不容易。那么,这是否意味着作为一个普通爱好者攒一个水下机器人美梦的破灭?
如果我们的梦想是“玩”和娱乐,相对来说还是比较容易实现的。如果主要是为“玩”娱乐而进行尝试,笔者建议你在水下机器人ROV在构成上应当删繁就简,不必面面俱到;但要考虑上文中所涉及的一些常识。
如果梦想是为生产服务和科研工作,就要麻烦一些,恐怕不是一个人能完成的事情。此外,水下各种设备零部件总的来说价格较高,而且有些根本买不到,需要定制和自制。水下和深海的环境比较恶劣,机器人要在这样的环境下经受住考验达到自己的期望,一般来说不太容易,一帆风顺的可能性很低,应该有必要的心理准备和承受力。而具备一些机械、电子、水流体力学或海洋物理、计算机软件编程等方面的知识,既会动脑又会动手,那就不要放弃美梦成真的可能性。可以多向专业人士学习,向着这个方向去努力吧!